As shown in Fig. 11.8, a torque motor consists of an armature, two coils, and two pole pieces. The coils are wrapped on the armature, and the armature is mounted such that the ends are positioned in the center of the air gap between the upper and lower pole pieces. Permanent magnets are incorporated in the pole pieces. When current is supplied to the coils, the armature rotates clockwise or counterclockwise, depending on polarity produced in the armature. Current in the opposite direction produces the opposite polarity and the opposite rotation.
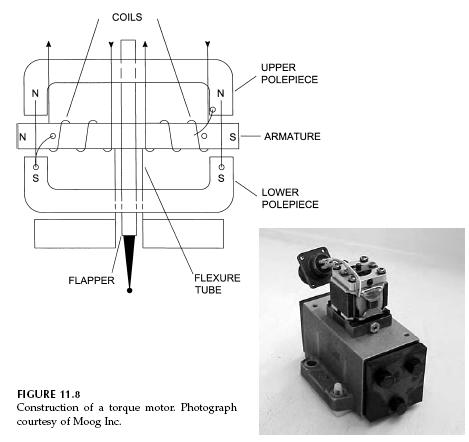
A key to the operation of the torque motor is the mounting of the armature to a flexure tube. This mount bends as the armature turns. The armature stops pivoting when the torque produced by magnetic attraction equals the restraining torque produced by deflection of the flexure tube. This design prevents the armature from touching the pole pieces.
The torque motor coil can be immersed in oil, classified as a wet torque motor, or operated dry. Even though a wet torque motor has the advantage of cooler operation, most servo valves use dry torque motors, because the magnets
tend to attract metal particles circulating in the fluid, and this eventually causes failure.
A dry torque motor is a very reliable component. A current overload will burn out the coil; otherwise, the design life of a torque motor is indefinite.
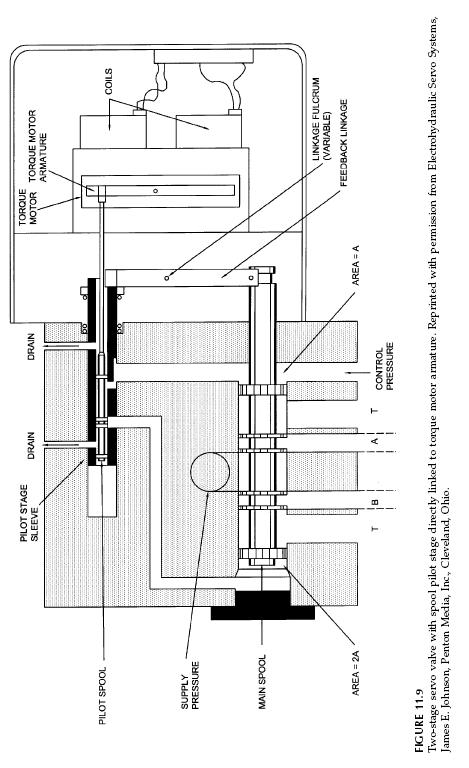
The torque motor can move the pilot spool directly when it rotates. In Fig. 11.9, a rod connects the pilot stage spool to the armature. When the armature rotates, it shifts the pilot stage, which ports fluid to the second stage, causing it to shift. Note the feedback linkage between the pilot stage and the second stage. Suppose the second stage shifts to the right to connect P to A (the supply pressure to Port A). The feedback linkage rotates counterclockwise about the fulcrum, and the top slides the pilot stage sleeve to the left. When this sleeve centers on the pilot spool, flow is cut off to the second-stage spool, and it stops moving. The feedback linkage ensures that the second-stage spool always has the same relative position as the pilot-stage spool. If the pilot spool shifts 25% to the right, the second-stage spool shifts 25% to the left.
Note that the linkage fulcrum is adjustable so that the valve can be “tuned” to exactly align the spools. More detail on this principle of providing feedback between components will be given later.